Abstract
Teaching robots to fold, drape, or reposition deformable objects such as cloth will unlock a variety of automation applications.
While remarkable progress has been made for rigid object manipulation, manipulating deformable objects poses unique challenges, including
frequent occlusions, infinite-dimensional state spaces and complex dynamics. Just as object pose estimation and tracking have aided robots
for rigid manipulation, dense 3D tracking (scene flow) of highly deformable objects will enable new applications in robotics while aiding existing approaches,
such as imitation learning or creating digital twins with real2sim transfer. We propose DeformGS, an approach to recover scene flow in highly deformable scenes,
using simultaneous video captures of a dynamic scene from multiple cameras. DeformGS builds on recent advances in Gaussian splatting, a method that learns
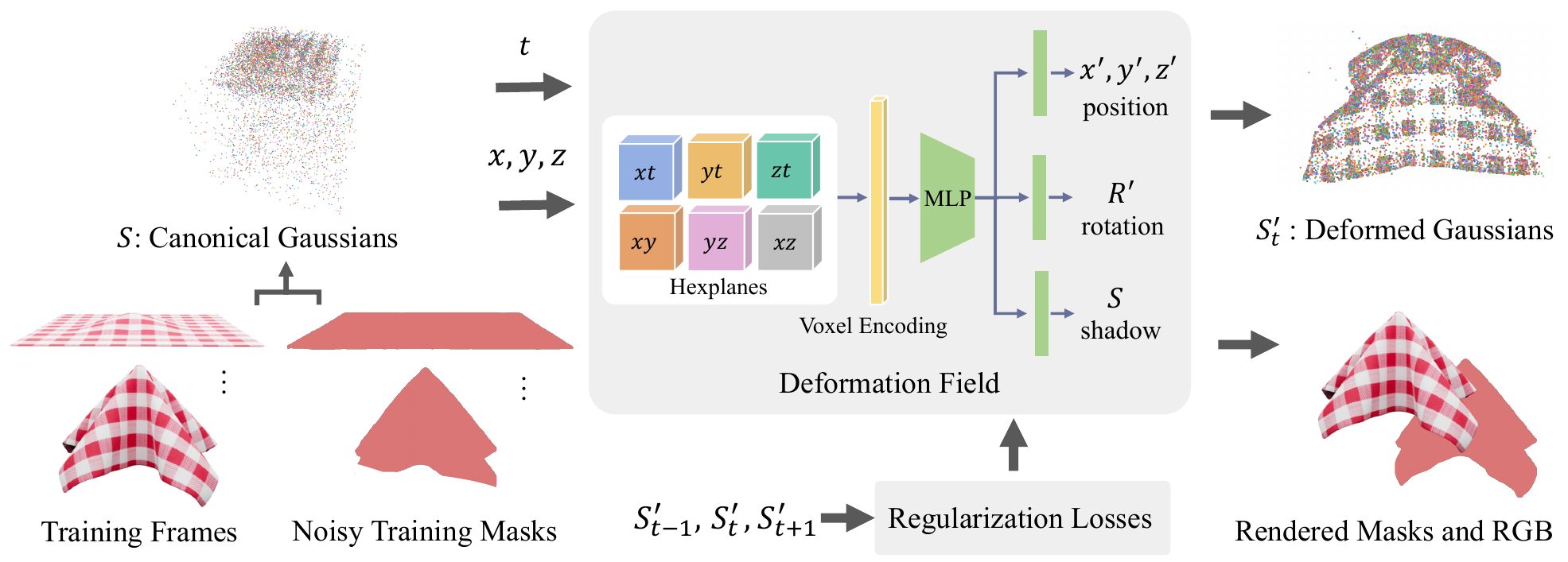
the properties of a large number of Gaussians for state-of-the-art and fast novel-view synthesis. DeformGS learns a deformation function to project a set
of Gaussians with canonical properties into world space. The deformation function uses a neural-voxel encoding and a multilayer perceptron (MLP) to infer Gaussian position,
rotation, and a shadow scalar. We enforce physics-inspired regularization terms based on conservation of momentum and isometry, which leads to trajectories with smaller
trajectory errors. We also leverage existing foundation models SAM and XMEM to produce noisy masks, and learn a per-Gaussian mask for better physics-inspired regularization.
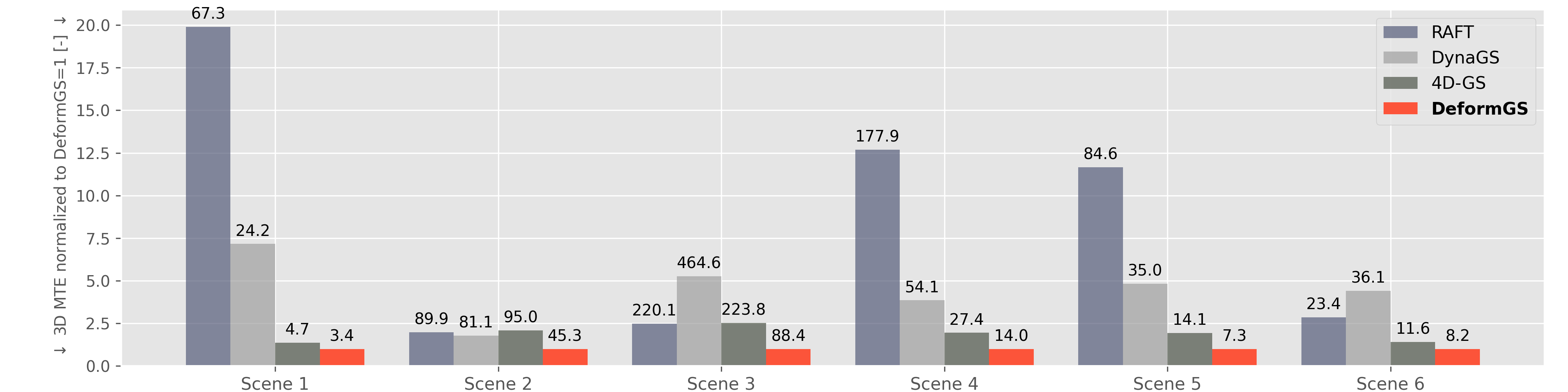
DeformGS achieves high-quality 3D tracking on highly deformable scenes with shadows and occlusions. In experiments, DeformGS improves 3D
tracking by an average of 55.8% compared to the state-of-the-art. With sufficient texture, DeformGS achieves a median tracking error of 3.3 mm on a cloth of 1.5 × 1.5 m in area.